Advanced driver assistance for tram drivers in 5 European cities

The Challenge
European tram networks face significant safety and operational challenges, particularly in dense urban environments where trams operate in mixed traffic with cars, cyclists and pedestrians. Despite their sustainability benefits, tram systems experience elevated collision risks in certain urban settings due to complex interactions at intersections, pedestrian crossings and shared street sections. These operational environments increase the likelihood of conflicts with other road users and contribute to safety challenges that require advanced monitoring, prediction and traffic management solutions.
In the 5 cities (Antwerp, Lisbon, Zaragoza, Barcelona and Utrecht), pre-implementation assessments highlighted recurrent issues such as near-miss incidents in busy city centres, limited visibility in narrow or curved street sections and unpredictable obstacles (pedestrians, bicycles, improperly parked vehicles). These factors led to safety risks, service disruptions and increased stress and cognitive load for drivers.
Operationally, tram operators also reported reduced punctuality and reliability, with delays propagating across networks after safety-related slowdowns or incidents. At the same time, European operators face driver shortages, increasing the need for tools that support drivers and reduce workload without altering infrastructure.
The Solution
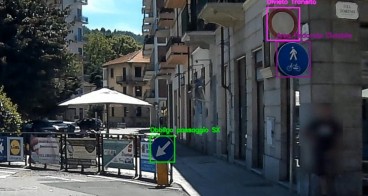
The ARISE project deployed OTIV.TWO, an AI-based Advanced Driver Assistance System (ADAS), to address safety and operational challenges in tram networks without requiring infrastructure changes. The solution provides real-time situational awareness, hazard prediction and actionable alerts to drivers, enabling proactive responses to potential collisions, obstacles and complex urban traffic situations.
Key characteristics include:
- AI-powered hazard detection: identifies pedestrians, cyclists, vehicles and unusual events in mixed traffic
- Driver assistance interface: delivers intuitive visual and auditory alerts, reducing cognitive load and stress
- Operational support: monitors speed, braking patterns and route compliance to improve punctuality and efficiency
- Infrastructure-light deployment: requires only onboard sensors and processing units, allowing rapid scaling across cities.
- Data analytics and feedback: aggregates operational data to inform continuous system improvement and operator decision-making.
By providing predictive support, OTIV.TWO has reduced near-misses, improved driver confidence and smoothed tram operations, directly tackling the challenges of safety, reliability and operational stress identified pre-implementation. Pilots in Antwerp, Lisbon and Zaragoza confirmed that the system enhances service punctuality by ~5%, supports accident reduction targets of ~20%, and fosters safer, more sustainable urban mobility.

Making an impact
The project achieved measurable social, ecological and economic impacts through real-world deployment of the OTIV.TWO AI-based driver assistance system.
From a safety and social impact perspective, pilot results indicate a targeted reduction of up to 20% in safety-critical events (e.g. collisions and near-misses), improving protection for tram drivers, passengers, pedestrians and cyclists. Drivers reported increased situational awareness and reduced stress when operating in dense urban traffic.
From an operational and economic impact perspective, tram operators observed up to 5% improvement in operational efficiency, including smoother driving behaviour, reduced unscheduled stops and improved service regularity. These gains contribute to lower disruption costs and better asset utilisation.
From an ecological impact perspective, improved reliability and safety strengthen the attractiveness of tram transport, supporting modal shift away from private cars and reinforcing cities’ climate and air-quality goals.

Lessons learnt
During deployment, several challenges provided valuable learning. One key issue was the heterogeneity of urban rail fleets. Close cooperation with operators and drivers was essential to adapt the solution without disrupting daily operations.
Another challenge was driver acceptance. Early involvement of drivers through training sessions, feedback loops and gradual system activation proved critical to building trust and ensuring effective use of the assistance features. This highlighted the importance of human-centred design when introducing AI in safety-critical transport systems.
A major success factor was the decision to deploy a non-intrusive, infrastructure-light solution, enabling rapid replication across cities without costly civil works. The project also demonstrated the value of real-world pilots over simulations, allowing performance to be validated under genuine urban complexity.
These lessons confirm ARISE’s strong replicability potential: the solution can be scaled to other tram networks facing similar safety and efficiency challenges, particularly in cities seeking fast, cost-effective improvements aligned with sustainability and Vision Zero objectives.