Public Mobile Robots on the forerun: critical standards to preserve quality
While public mobile robots (PMRs) are commonly described in terms of last-mile delivery new models which assist humans in public-space maintenance, management and monitoring have entered the scene. In this article, Bern Grush explains the need for a new robotics standard to preserve quality of public space in light of the upcoming wave of PMRs in cities.
When PMRs began to appear on public footways in the last decade, no standards covered this domain. Hence, in 2019, the draft standard ISO/TC204/WG19/DTS4448 was initiated. It focusses on “automated devices and machines that move, without an operator present, within public, shared spaces and among humans not trained or employed to interact or collaborate with them”. PMRs might be teleoperated non-line-of sight. Or they might be so highly automated as to need only occasional tele-assistance. The draft standard also addresses robotaxis or other robotic road vehicles as they are loading and unloading passengers or goods at the kerbside. Fully autonomous robots without real-time human teleoperation – for military, space and marine exploration – are not in scope for this standard. Neither are automated factory, warehouse or agricultural robots, since they operate in semi-structured environments.
Four core pillars enabling PMR while protecting quality of space
ISO DTS4448 addresses four fundamental concerns regarding public mobile robots as deployed in public pedestrianised spaces.
- Accessibility relates to comfortable physical access for proximate humans and to the universal availability of the services that these devices may offer to humans within a fleet’s operational design domain (ODD). No proximate person is disturbed or delayed, and no person is denied a service available to anyone else for reasons of that person’s disability.
- Behaviour relates to real-time navigational micro-decisions that robots or their teleoperators make relative to social, spatial, schedule and travel rules of the walkways, bikeways, roadways or crosswalks they use. These rules of the pathway are analogous to rules of the road, but are more precisely described than are human driver codes that may incorporate concepts such as “eye contact” or “due care.”
- Traffic orchestration relates to the spatial coordination of multiple PMRs fleets, each operated by independent operators each with a variety of robots assigned independent tasks on independent schedules. Such ground traffic control has analogies to air traffic control with its runways as well as to automotive traffic control and its signage and signals. PMR traffic orchestration must be subservient to the spatial and safety requirements of the ODDs in which the PMRs are operating, and orchestration necessarily subsumes accessibility, behaviour, and safety. A key example of this interrelationship is a coordinated body of sound, light and gestural signals to communicate PMR intentions to proximate humans.
- Safety relates to ensuring that robots cannot cause harm to proximate persons, to infrastructure, to the flow of traffic, to active transportation users, to other robots, devices, automobiles, or to themselves. Safety is further subdivided into three areas:
- Location safety ensures that it is highly unlikely for a PMR to become lost, disoriented, trapped, unrecoverable, confused at an intersection, or other location-related failure, regardless of its level of automation. This implies specifying capabilities of longitudinal, lateral and surface control, perception reliability, localisation and odometry, as well as road crossing systems.
- Device safety is related to power safety (battery charge, battery fire), task component safety (attached tools), electronics safety, braking, load containment, and failure recovery systems.
- Human interaction safety addresses communication safety (cybersecurity), robot-to-human intention signalling, seizure and emergency compliance systems.
Ancillary components to complete the urban context perspective
These four pillars cannot be developed independently. They form a whole and are bound within the single standard ISO DTS4448 (incl. currently 20 parts). This core is supported by ancillary but still critical components:
- Determination of the suitability of kerbside infrastructure for automated loading and unloading,
- Suitability of pedestrian infrastructure for the deployment of specific types and volumes of PMRs,
- PMR weather-worthiness, incident reporting,
- Testing, as well as,
- Shared maps, data, privacy and journey data recorders.
PMRs to transport humans or follow humans (personal assistants) are also included.
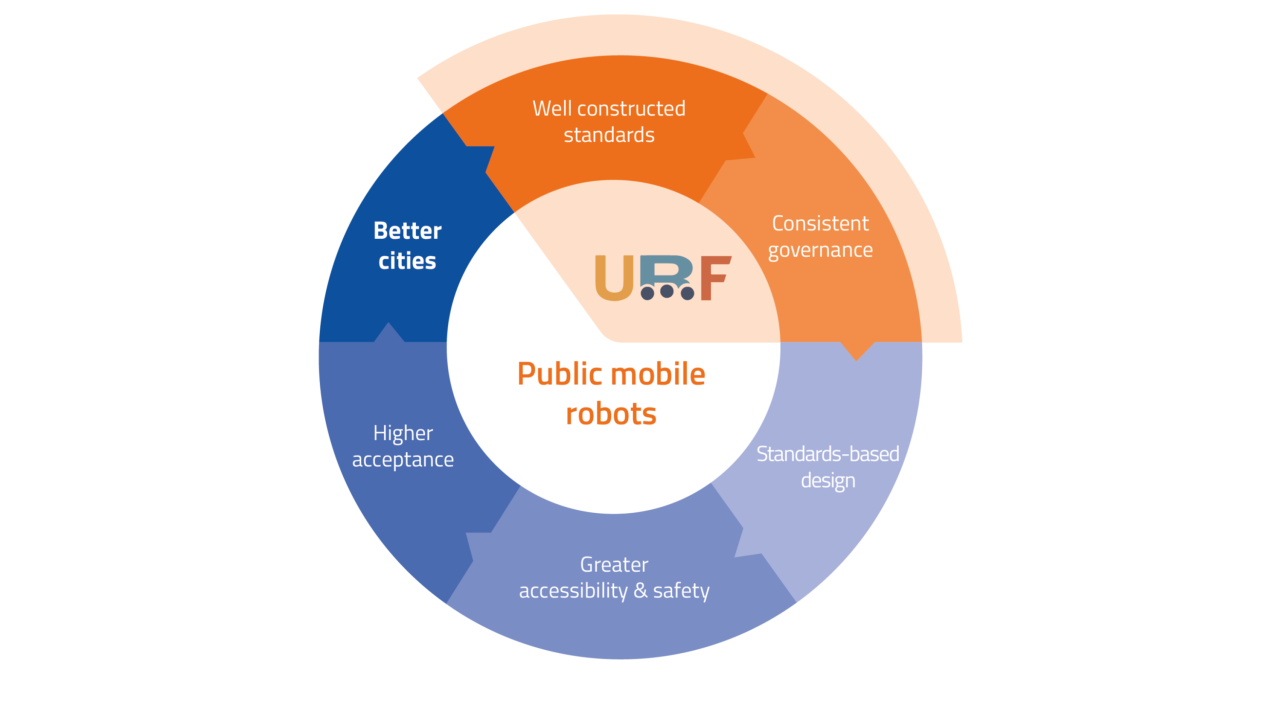
It is critical to achieve a standard that can be deployed consistently across fleets and cities so that pedestrians of all ages and every sensory, cognitive, and mobility ability can move among these devices safely, and without inconvenience or delay.
Access further information in the files section below.
Bern Grush is the Executive Director of the Urban Robotics Foundation (URF). ISO 4448 is a five-year effort. The ISO working group and the URF members that review its drafts currently comprise some 60 people. URF seeks international members both to support the work and to ensure nothing is overlooked. Reach out if this applies to you.
Published on 13 January 2023.